人工智能复习
人工智能复习
第一章 绪论
考点
- 人工智能的定义、概况;
- 人工智能主要学派及主要观点。
什么是人工智能?
需要先有信息、认识、知识、智力、智能概念才能定义人工智能。
- 信息:是搭配了上下文的数据,是经过整理(解释)的数据,例如“今天天气是30摄氏度”,配合上下文(天气和摄氏度)形成了有意义的信息。
- 认识:是用符号(例如文字)去整理信息,并且确定它们之间的联系。
- 知识:是被认识了的信息和信息之间的联系。是经过加工(整理)的信息,例如“水在摄氏度0度以下会结冰”就是一种知识。
- 智力:是学习的能力、解决问题的能力,强调运用推理来应对问题。
- 智能:定义为知识集 + 智力。所以智能就是运用知识来解决问题的能力。
人工智能定义:就是利用机器去模仿人类的智能来解决问题。
人工智能学派及主要观点
符号主义学派(数理逻辑)
- 主要观点:人工智能源于数理逻辑。认知基元是符号,以归结原理为基础。
- 应用:IBM提出的
DEEP BLUE国际象棋和WATSON认知系统。
联结主义学派(仿生学)
- 主要观念:人工智能源于仿生学。通过神经元连接和相互作用模拟大脑的结构和功能,通过神经网络来实现智能行为。
- 应用:计算机视觉、卷积神经网络、自然语言处理。
行为主义学派(控制论)
- 主要观念:人工智能来源于控制论和反馈机制。通过模拟生物体在环境中的适应能力和行为来实现智能。
- 应用:强化学习、Google研发的机器狗。
第二章 知识表示和推理
考点
-
命题逻辑语法、语义;
-
谓词逻辑语法、语义;
-
谓词推理规则(等价式、永真蕴含式)以及应用;
-
命题及谓词逻辑归结推理(子句、子句集、置换与合一、答案提取)。
谓词逻辑
- 项
- 常数(Constant):表示特定的对象,例如
a、b、c。 - 变量(Variable):表示可以取不同值的对象,例如
x、y、z。
- 常数(Constant):表示特定的对象,例如
- 谓词
- 谓词符号通常是大写字母,例如P(x)、Q(a,b)。
- 量词
- 全称量词(Universal Quantifier):表示对所有的情况都成立,符号为∀,例如∀x P(x)表示“对所有x,P(x)都成立”。
- 存在量词(Existential Quantifier):表示存在某种情况成立,符号为∃,例如∃x P(x)表示“存在某个x,使得P(x)成立”。
谓词逻辑推理规则
-
假言推理:
P→Q, P ⇒ Q
-
假言否定:
P→Q, ¬Q ⇒ ¬P
-
等等
谓词逻辑应用
- 课件一中有两题例子,可以刷下。
归结推理
需要先了解反证法、子句集、归结操作的概念才能清楚归结推理。
-
反证法
P ⇒ Q 当且仅当 P ∧ ¬Q ⇔ False
-
子句集
- 文字:原子公式及其否定。例如:P:正文字,¬P:负文字。
- 子句:任何文字的析取,当然一个文字自己也是子句。例如:P ∨ Q ∨ R。
- 子句集:子句的合取集合。例如 {P ∨ Q, ¬P ∨ R, ¬Q}这个子句集合表示了一个包含三个子句的集合,其中 P ∨ Q, ¬P ∨ R, 和 ¬Q 是各自的子句。在归结推理中,我们可以通过归结操作来处理这些子句,从而推导出新的子句或证明目标。
-
归结操作
- 定义:归结操作步骤包括选择两个子句并尝试将它们合并成一个新的子句。合并的过程依赖于通过消解相反的文字来生成新的子句。
- 例子:有两个子句{P ∨ Q, ¬Q},经过归结操作后生成新子句{P}。
归结推理的基本步骤是利用反证法:首先将目标子句的否定加入子句集中,然后通过归结操作处理子句集,直到推导出空子句。根据反证法的原理,这表明目标子句是可证明的。
-
谓词公式转换子句集
- 消去蕴涵和等价符号
- 内移否定符号¬
- 变量标准化(变量换名)
- 消去存在量词(
Skolemize) - 化为前束型
- 把母式化成合取范式
- 略去全称量词
- 把母式用子句集表示
- 子句变量标准化(最好每个子句的变量都不一样)
-
合一
- 定义:在谓词归结过程中(子句集内)寻找谓词相同但是项不同,把它们不同的项经过置换,使得该谓词项相同,就是合一。
-
置换
-
定义:用σ = {v1/t1, v2/t2,…, vn/tn}来表示任一置换。vi /ti 是指表达式中的变量vi以项ti来替换,且不允许vi 用与vi 有关的项ti(但是ti中可以包含其它变量)作置换。
-
例子:{a/x, w/y, f(s)/z}是置换; {x/x}, {y/f(x)}不是置换;、
-
置换是同时进行的。
-
-
复合置换
- 过程:θ={t1/x1,…,tn/xn},λ={u1/y1,…,um/ym},求θ°λ
- 构成{t1λ/x1,…,tnλ/xn,u1/y1,…,um/ym};(可想象成先置换t1λ/x1,…,tnλ/xn这一部分再一个一个置换λ)
- 如果yj∈(x1,…,xn), 则删除uj/yj;(即替换的变量前面已经被换过了)(要记得是θ先做变换的,只要是θ里面更换的变量,λ都要删除)
- 如果tkλ=xk, 则删除tkλ/xk;(类似 y / y这种)
- 性质:(θ° λ)° μ=θ° (λ° μ) 成立,θ° λ=λ ° θ 不一定成立。
- 过程:θ={t1/x1,…,tn/xn},λ={u1/y1,…,um/ym},求θ°λ
-
最一般合一项(MGU)算法:
给定两个原子公式 f 和 g:
-
初始化:
σ={ };S={f,g}
σ 是当前的替换集,初始为空。 S 是包含两个公式 f 和 g 的集合。
-
检查 S 是否包含相同的一对公式。如果是,停止并返回 σ 作为 f 和 g 的 MGU。
-
否则,找到 S 中不一致的项集 D={e1,e2}。
-
检查不一致的项:
- 如果 e1=V 是一个变量,并且 e2 是不包含 V 的项(反之亦然),则更新替换集: σ=σ ° {V=t};S=S ° {V=t}。
-
否则,停止,表示 f 和 g 不能被合一。1
-
-
应用归结原理求解问题
- 就是把待求解的问题否定加上与
A(x)析取转换成子句并加入到子句集合中,运用归结操作求解答案。
- 就是把待求解的问题否定加上与
第三章 搜索技术
考点
- 盲目搜索(深度搜索、宽度搜索、迭代加深搜索);
- 启发式搜索(最好优先搜索、A*搜索);
- 博弈树搜索(极大极小过程、alpha-beta剪枝)。
搜索的形式化定义
- 状态空间:即整个要搜索的空间。
- 动作:即在当前这个状态需执行的动作。
- 初始状态:就是自己目前的状态。
- 目标状态:目标的状态。
- 启发式函数:指导搜索的方向。
除此之外,搜索算法还包括后继函数、动作成本以及如何选择下一步动作(这个最重要)等等。
盲目搜索(无信息搜索)
采用固定的选择策略来选择下一个状态。
宽度优先搜索
- 定义:把当前要扩展的状态的后继状态放在边界的最后。
- 性质:宽度优先搜索具有完备性和最优性。
- 完备性:宽度优先从短到长从上到下慢慢搜索,最终一定能找到目标状态。
- 最优性:根据宽度优先搜索定义,短的路径一定会在长的路径前被探索完,所以一定有最优性。
- 时空复杂度:时空复杂度开销很大,都是O(b^{d+1}),特别是空间复杂度。
深度优先搜索
- 定义:把当前要扩展的状态的后继状态放在边界的最前面。
- 性质:深度优先搜索不具有完备性和最优性。
- 完备性:如果状态空间无限或者存在回路则找不到目标状态;若状态空间有限并且一直进行剪枝的话具有完备性。
- 时空复杂度:时间复杂度为O(b^m),空间复杂度O(bm)。
迭代加深搜索
其实就是深度优先和宽度优先缝合;具有宽度优先的优势(每个节点都搜索),也具有深度优先的优势(搜索快)
- 定义:迭代加深搜索从深度限制为0开始,逐渐增加深度限制,直到找到目标节点或搜索完整个图。每次搜索都是深度优先搜索,但只允许到当前的最大深度限制为止。
- 性质:具有完备性和最优性。
- 完备性:类似宽度优先一样。
- 最优性:类似宽度优先一样。
- 时空复杂度:空间复杂度为O(b^{d})(跟宽度优先一样,可是不用提前存储下一层的节点);时间复杂度为O(bm)(跟深度优先一样)。
启发式搜索
对于一个具体问题,构造专用于该领域的启发式函数 ℎ(𝑛), 该函数用于估计从节点𝑛到达目标节点的成本。要求对于所有满足目标条件的节点𝑛,有ℎ(𝑛) = 0。并且使用**评价函数f(n)**来选择下个要到达的状态。f(n) = g(n) + h(n)
- g(n)是初始节点到n的实际代价。
贪婪最佳优先搜索
- 定义:就是利用启发式函数ℎ(n) 来对边界上的节点进行排序,然后每次选择**ℎ(n)**最小的节点n去搜索。
- 评价函数(可以理解成):f(n) = h(n)
- 性质:没有完备性和最优性。
A*算法
-
定义:就是利用评价函数f(n) 来对边界上的节点进行排序,然后每次选择f**(n)**最小的节点n去搜索。
-
评价函数:f(n) = g(n) + h(n)
- 启发式函数**h(n)*可采纳性:假设ℎ*(𝑛) 是从节点𝑛到目标节点的最优路径的成本,当对于所有节点𝑛,满足ℎ(𝑛) ≤ ℎ(𝑛),ℎ(n)是可采纳的。
- 为什么叫可采纳,是因为一直低估了最优的代价,可以让A*算法更好的找到最优解。
- 启发式函数**h(n)**一致性:对于任意节点𝑛1和𝑛2,若 ℎ(𝑛1) ≤ 𝑐(𝑛1 → 𝑛2) + ℎ(𝑛2) 则ℎ(𝑛)具有一致性。
- 为什么叫一致性,因为保证f值是非递减的。

- 为什么叫一致性,因为保证f值是非递减的。
- 证明:一致性可推可采纳性:
- 假设启发式函数 h(n)是一致的。
- 假设 h(n) 不是可采纳的。这意味着存在某个节点 n 使得 h(n)>h∗(n)。
- 选择一个实际从起始节点 s 到目标节点的最优路径,并设这个路径为 s,n1,n2,…,ng,其中 ng 是目标节点。
- 在这条路径上,由于 h 是一致的,我们有:

- 由于目标节点 ng 的启发值为零(即 h(ng)=0),将这些不等式相加得到:

- 因为 c(s,ng)c(s, n_g)c(s,ng) 就是从 sss 到 ngn_gng 的最小实际代价 h∗(s)h^*(s)h∗(s),所以: h(s)≤h∗(s)
- 这与假设的 h(s)>h∗(s) 矛盾。因此,假设 h(n) 不是可采纳的前提是错误的。
- 启发式函数**h(n)*可采纳性:假设ℎ*(𝑛) 是从节点𝑛到目标节点的最优路径的成本,当对于所有节点𝑛,满足ℎ(𝑛) ≤ ℎ(𝑛),ℎ(n)是可采纳的。
-
性质:可能具有最优性。
-
一致性可以推出可采纳性。
-
如果**h(n)**只具有可采纳性,没有环检测的情况下是有最优性的。有环检测则不是。
-
如果**h(n)**具有一致性,就算有环检测,也有最优性。
-
博弈树搜索
Minimax算法
- 定义:假设对方能总是做出最优的行动,己方总是做出能最小化对方获得的收益的行动,通过最小化对方的收益,可以最大化己方的收益。
- 使用深度优先搜索。(模拟算法很重要)
剪枝
只要计算节点n的一部分子节点就可以确定在MiniMax算法中我们不会考虑走到节点n了;如果已经确定节点n不会被考虑,那么也就不用继续计算n的子节点了。如下图:x和y已经不用被搜索了。
- MAX剪枝:对于Max节点n,如果它的α(子) ≥ β(父)的时候,就可以停止遍历n的子节点了。

- MIN剪枝:对于Min节点n,如果它的α(父) ≥ β(子)的时候,就可以停止遍历n的子节点了。

简单来说,对于Min节点n, 如果β值变得 ≤ 某个Max 祖先节点的α值, 那么就可以停止扩展n节点了。Max节点也是一样的。
要记得!是α ≥ β就可以发生剪枝!
第四章 高级搜索
考点
- 爬山法(基本思想);
- 遗传算法(基本操作)(旅行商问题)。
爬山法(基本思想)
- 是一种贪婪局部搜索算法。 能很快朝着解的方向进展。
- 登高:一直向值增加的方向持续移动,将会在到达一个 “峰顶”时终止,并且在相邻状态中没有比它更高的值。 这个算法保留搜索得路径,因此当前节点的数据结构只需要记录当前状态和它的目标函数值。
- 优点:
- 它们只用很少的内存。(因为没有保留搜索得路径)
- 它们通常能在很大状态空间中找到合理的解。
- 可以把爬山法想象成一种地形图,既有“位置”(用状态定义),又有“高度”(用启发式函数定义)。

- 爬山法的缺点:容易陷入局部最优解。
- 局部最大值:局部极大值是一个比它的每个邻居状态都高的峰顶,但是比全局最大值要低。爬山法找不到最优解。
- 山脊:就是一系列的局部最大值,爬山法搜索容易陷入死循环。
- 高原:高原是在状态空间地形图上评价函数值平坦的一块区域。像上图的
shoulder(山肩)和flat local maximum(水平的局部最大值)都是高原。爬山法搜索效率降低。
- 解决优点:从不同的状态开始运行爬山法看看哪个解更好。
爬山法和模拟退火的区别
因为爬山法是局部贪婪算法,所以容易陷入局部最优解;模拟退火算法是全局优化算法,它可以接受比当前更差的解,所以不会容易陷入局部最优解,并且随着时间慢慢降低接受差解的概率。
模拟退火
三函数两准则(状态生成函数 状态接受函数 降温函数 退火结束准则 内循环终止准则)
流程图:

遗传算法(基本操作)
遗传算法的一般步骤为
流程中,不一定每个个体都会发生交叉和变异,都是有概率的。
包括编码、适应度函数、选择、交叉、变异。(后面三种为基本操作)
-
编码:就是将每个个体进行二进制编码。
-
适应度函数:返回值是判断该个体的适应度,适应度越大代表该个体越好。
-
选择:选择是用来确定重组或交叉个体,以及被选个体将产生多少个子代个体。适应度越大的个体被选择的概率越大。选择方法有:
- 轮盘赌:首先按照适应度比例分配给每个个体被选中的概率,然后所有个体被选中概率之和为1,再随机[0,1]生成浮点数,看落在哪个区间,就选择哪个个体。

- 锦标赛选择:就是按照轮盘赌抽几个个体进行适应度比较,适应度高的个体被选择,一直重复执行下去。
- 轮盘赌:首先按照适应度比例分配给每个个体被选中的概率,然后所有个体被选中概率之和为1,再随机[0,1]生成浮点数,看落在哪个区间,就选择哪个个体。
-
交叉:结合父代中选择的个体中的信息而产生新的个体。交叉方法有:
- 单点交叉:在个体串中随机设定一个交叉点,实行交叉时,该点前或后的两个个体的部分结构进行互换,并生成两个新的个体。

- 两点交叉:随机设置两个交叉点,将两个交叉点之间的码串相互交换。
- 单点交叉:在个体串中随机设定一个交叉点,实行交叉时,该点前或后的两个个体的部分结构进行互换,并生成两个新的个体。
-
变异:子代基因按小概率扰动产生的变化。变异方法有:
- 位点变异:群体中的个体码串,随机挑选一个或多个基因座,并 对这些基因座的基因值以变异概率作变动。

- 位点变异:群体中的个体码串,随机挑选一个或多个基因座,并 对这些基因座的基因值以变异概率作变动。
-
遗传算法的特点:遗传搜索是针对一组候选解决方案(individuals)而不是单个候选方案进行的。在搜索过程中,算法会保留当前一代的一组个体。遗传算法的每次迭代都会创建下一代个体。相反,大多数其他搜索算法都维持单个解决方案,并迭代地修改它以寻找最佳解决方案。例如,梯度下降算法沿当前最陡下降方向迭代移动当前解,梯度方向为给定函数的梯度的负数。
-
遗传算法的群体初始化规模:太小会导致局部最优解,太大会难以收敛。
-
例子:TSP旅行商问题、背包问题
第五章 不确定知识表示以及推理
考点
- 贝叶斯网络定义及表示、联合概率表示、构建方法、朴素贝叶斯方法、独立性判断D分离;
- 贝叶斯网络边缘概率及条件概率计算。
贝叶斯网络定义及表示
- 定义:它由一个有向无环图(表达了变量之间的有向依赖关系)和一系列条件概率表(衡量了上述关系的强度)组成。

- 补充:P(e)可推出P(e)(一个参数),需要知道P(c|e)和P(c|e)可推出P(c|e)和P(c|~e)(两个参数)。以此类推。
- 贝叶斯网络的构建:
- 在某种变量顺序下,对所有变量的联合概率应用链式 法则 Pr(X1,…,Xn) = Pr(Xn|X1,…, Xn-1)Pr(Xn-1|X1,…, Xn-2)…Pr(X1)
- 对于每个变量Xi ,考虑该变量的条件集合X1,…,Xi-1,Xi 和Xj 是条件独立的,则将Xj 从Xi 的 条件集合中删除。经过这一步骤,可以得到下式 Pr(X1,…,Xn) = Pr(Xn|Par(Xn))Pr(Xn-1|Par(Xn-1))…Pr(X1)。
- 基于上述公式,构建一个有向无环图。其中,对于每个用节点表示的变量Xi,其父节点为Par(Xi)中的变量集合。
- 为每个家庭(即变量及其父节点集合)确定条件概率表的取值。
朴素贝叶斯方法(上网找些题目看看)
- 定义:就是人为定义条件独立的变量,使得式子变得更加简单。即类似P(A,B,C,D) = P(A|B)P(C|B)P(D|B)。

- 就是先算给定x向量情况下y为正的可能性和y为负的可能性。
轻松搞定朴素贝叶斯(有例题)_朴素贝叶斯算法例题-CSDN博客这个讲的挺好的。
条件概率
- 极大似然法:就是先把式子列出来,然后对数,再对该式子求导并且等于0。

贝叶斯网络的D-分离
-
串形连接: 在串行连接中A通过事件B影响C,同样事件C也是用过事件B影响A。我们认为当证据B确定时,A、C条件独立。
-
共同的原因:给定父节点的前提下,子节点们条件独立。
-
共同的作用:当不给定子节点时,父节点们条件独立。
-
若存在一条路径将这两个节点(直接)连通,则称这两个节点是相关的。若不存在这样的路径将这两个节 点连通,则这两个节点就是独立的。
贝叶斯网络计算
- 就是一直使用加法原理把父节点加入到式子中,然后链式法则,再对式子展开(条件独立就可以删除)。

第七章 机器学习
考点
- 监督学习(分类与回归,感知机、逻辑回归;神经网络、反向传播、CNN、RNN);
- 非监督学习(Kmeans);
- 强化学习(MDP定义、状态值函数和动作值函数、Q学习及SARSA、DQN)。
有监督学习
- 定义:会给定输入特征和输出的标签(Y)
分类
- 定义:预测离散型变量。给定(x1, y1), (x2, y2), …, (xn, yn),学习一个输入x、预测y的函数f(x)。y是离散的。

回归
- 定义:预测连续性变量。给定(x1, y1), (x2, y2), …, (xn, yn),学习 一个输入x、预测y的函数f(x) 。y是连续的。

联结主义(Connetionism)学派:认为人工智能源于仿生学。(神经网络)
感知机学习
解决二分类问题的算法。是有监督学习中的分类。
-
定义:主要是处理线性可分的数据。对于拥有d个特征的 x=(x1,x2,…,xd) , 计算它的带权“分数” 。如果分数大于0则预测为真,分数小于0则预测为假。
-
输入层:感知机接收一组输入特征向量 x=(x1,x2,…,xn),每个输入有一个对应的权重 w=(w1,w2,…,wm)。
-
加权求和:输入特征向量和权重向量进行加权求和,计算公式为:
\begin{equation} z = \mathbf{w} \cdot \mathbf{x} + b = \sum_{i=1}^{n} w_i x_i + b \end{equation}
其中,b是偏置。
-
激活函数:加权求和的结果通过激活函数(通常是阶跃函数)进行处理,输出一个二值结果。阶跃函数的定义为:
-
损失函数:定义为所有误分类点到分类线距离的总和。(M是所有误分类点的集合)
修改函数利用梯度下降法:
\begin{align} \nabla_w L(w,b) &= -\sum_{\mathbf{x}_i \in M} y_i \mathbf{x}_i \\ \nabla_b L(w,b) &= -\sum_{\mathbf{x}_i \in M} y_i \end{align}
-
感知机学习:
-
先初始化权重向量w(0)和偏置b , 然后根据D来修正w和b。(通常初始化为0)
-
对于每个训练样本,计算感知机的输出。
-
如果感知机某个样本的输出与真实标签不一致,根据以下规则更新权重和偏置:
\begin{align} w_{i+1} &\leftarrow w_i + \eta y_i x_i \\ b &\leftarrow b + \eta y_i \end{align}
其中η是学习率。
-
跳回第二步。
-
-
分类图片如下:
逻辑回归
感知机算法只要计算的分数大于0输出标签为真,可是分数1和1000也是输出标签为真。
解决多分类的算法。
-
定义:和感知机学习算法一样,主要处理线性可分的数据。对于拥有d个特征的 x=(x1,x2,…,xd) , 计算一个0到1的概率值,表示样本属于某个类别的概率。
-
输入层:感知机接收一组输入特征向量 x=(x1,x2,…,xn),每个输入有一个对应的权重 w=(w1,w2,…,wm)。gai
-
加权求和:输入特征向量和权重向量进行加权求和,计算公式为:
\begin{equation} y = \mathbf{w} \cdot \mathbf{x} + b = \sum_{i=1}^{n} w_i x_i + b \end{equation}
其中,输出y是该样本属于这个类别的可能性(目前还未经过转化),b是偏置。
-
激活函数:使用Logistic函数将求和y映射到一个介于 0 和 1 之间的概率值:
这里的σ(y)是把刚刚加权求和的总数转换成概率。若y越大,则概率σ(y)就越大。
-
损失函数:定义为交叉熵函数。
yi 是第 i 个样本的真实标签(0或1),qi是模型预测的第 i 个样本属于类别 1 的概率。当qi越接近yi,损失函数值就越小。(等价于让损失函数最小)
修改函数利用梯度下降法:
\begin{align*} \nabla_{\mathbf{w}} L(\mathbf{w}) & = -\sum_{i=1}^{N} \left[ y_i - q_i \right] \mathbf{x}_i \end{align*}
-
逻辑回归学习:
-
初始化w和偏置 b,通常可以选择为零或者随机初始化。
-
对于每个训练样本 (xi,yi),计算模型的预测输出 qi=σ(w⋅xi+b)。
-
如果某个样本的输出与真实标签不一致,根据以下规则更新权重和偏置:
-
跳回第二步。
-
-
其实本质是二分类输出还是0和1,还是一条直线。
人工神经网络
单层神经网络
- 定义:一个基本的神经网络包括:输入、计算、输出。下图是一个典型的人工神经网络模型,它包含3个输入,1个 输出,以及2个计算功能。
- 人工神经元:人工神经网络中的计算单位。由下列部分组成:
- 输入信号xi
- 一个激活层对输入信号乘上加权求和,神经元的激活层由加权输入的总和确定。
- 一个阈值函数 f(x),该函数通过确定激活是低于还是高于阈值来计算最终输出。
- 应用:可以实现“与”、“或”功能,可是不能处理异或。
多层神经网络
优势:单层神经网络只能处理线性问题,而两层神经网络可以无限逼近任意连续函数。面对复杂的非线性分类任务,带一个隐藏层的两层神经网络可以分类的很好。输入和输出节点之间的附加层称为隐藏层。
原因:从输入层到隐藏层时, 数据发生了空间变换。这是因为输入层的阈值函数是非线性的,对数据进行了转换。
传递:训练的算法每次迭代都有前向传递阶段和反向传递阶段。
- 前向传递阶段:利用第(l)层处的神经元的输出来计算第(l+1)层的输出。
- 反向传递阶段:第(l+1)层的权重在更新第(l)层的权重之前被更新。
激活函数:
-
双曲正切函数(tanh):
\begin{align} \tanh(x) &= \frac{e^x - e^{-x}}{e^x + e^{-x}}\\ \tanh'(x) &= 1 - \tanh^2(x) \end{align}
-
sigmoid函数:
\begin{align} f(x) &= \frac{1}{1 + e^{-x}}\\ f'(x) &= f(x) \left(1 - f(x)\right) \end{align}
函数的导数特性很重要!
损失函数:定义为最小二乘法:
为了使用梯度下降调整权重 wjk,我们首先计算在wjk 上误差E的偏导数:
\begin{align*} \frac{\partial E}{\partial w_{jk}} &= \frac{\partial E}{\partial e} \times \frac{\partial e}{\partial O_k} \times \frac{\partial O_k}{\partial w_{jk}} \\ &= -\left( e \right) \times \left( O_k (1 - O_k) \right) \times \left( O_j \right) \\ &= -(T_k - O_k) O_k (1 - O_k) O_j \end{align*}

前向传播输入:
- 净输入:

- 净输出:

反向传播误差:
- 对于输出层,定义误差为:
- 对于隐藏层,定义误差为:
- 权重更新公式(利用梯度下降):
- 缺点:很容易梯度消失,每传递一层梯度就是原本的0.25倍。
- (´∇`) 欢迎回来! (cnblogs.com)把这题刷一下基本没问题了(更改偏置b1和b2的时候,这个偏置项有点特殊,可以看成是一个隐藏层的节点进行处理,o1和o2的Err值都对它影响)
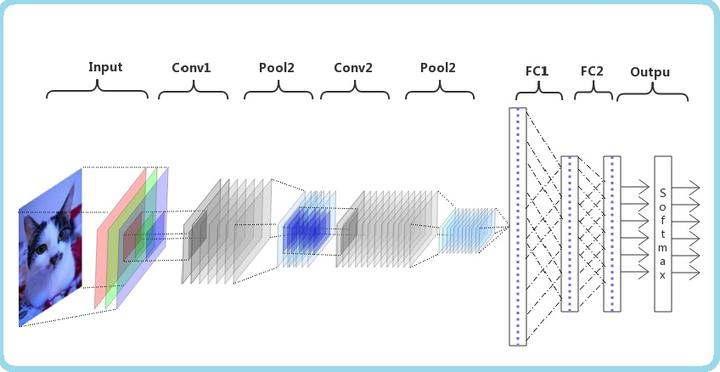
卷积神经网络(CNN)
-
是深度学习算法。主要用于图像识别。
-
卷积计算:如下图
描述卷积的四个量:卷积核个数、卷积核大小f、填充0值p、步长s。
假设原本大小为拿,卷积结果大小为(n可以是高或者宽)
-
卷积神经网络的构造
-
输入层:输入层接收原始图像数据。图像通常由三个颜色通道(红、绿、蓝)组成。(输入数据)
-
卷积层(可以有多层卷积层):将输入图像与卷积核进行卷积,然后再进行非线性变换(RELU),再进行池化。(提取特征)RELU函数为:
-
全连接层:全连接层将提取的特征映射转化为网络的最终输出。(就是多层神经网络)
-
输出层:输出层是CNN的最后一层,其神经元的数量等于分类任务中的类别数。输出层的激活函数根据任务的不同而选择,例如Softmax用于多分类任务,Sigmoid用于二分类任务。
-
-
卷积神经网络(CNN)是一种深度学习方法,它的发展历史可以追溯到20世纪90年代。最早的CNN是由Yann LeCun等人提出的,他们利用多层感知机(MLP)进行手写数字识别。随着技术的进步,CNN的结构变得越来越复杂,性能也得到了显著提高。
-
输入层用于接收原始数据,通常是图像数据。图像通常由三个颜色通道(红、绿、蓝)组成,每个通道包含图像的像素值。输入层只是数据的初始存储区域,不进行任何处理。
-
卷积层是CNN的核心部分,主要用于提取输入数据的局部特征。卷积层通过在每个位置计算卷积核与输入数据的点积,卷积操作后,特征图通过激活函数进行非线性变换,这种非线性变换使模型能够学习和表示更复杂的特征。池化层用于对卷积层生成的特征图进行下采样,减少特征图的尺寸,从而降低计算复杂度。
-
全连接层位于网络的最后几层,将前面层提取到的特征整合并映射到最终的输出。全连接层类似于传统的多层神经网络,每个神经元与上一层的所有神经元相连。通过全连接层,模型能够基于提取到的特征进行分类或回归任务。
-
卷积神经网络和全连接神经网络区别:卷积神经网络有卷积层能够提取更多的数据特征,并且卷积的时候参数是共享的还有平移不变性。
循环神经网络(RNN)
-
是深度学习算法,主要用于语言识别。
-
因为其余的神经网络输出只和当前时刻网络的输入相关。可是像预测天气这种问题还是很需要之前的数据的。这是一个有记忆的神经网络。
-
例如像判断广州是目的地还是出发地,需要看前一个英文单词,所以需要用到之前的记忆。
-
简单来说,就是隐藏层的输出还存储在记忆中,并且记忆内容作为隐藏层的输入。
-
例子如下:假设所有权重都是1,激活函数都是线性的。
-
第一步:
-
第二步:
-
第三步:
-
不同的输入顺序会影响到循环神经网络的输出,因为是有记忆的!
基本上理解卷积神经网络就是眼睛,主要用来图像识别;循环神经网络就像嘴巴,主要用来语言识别。
无监督学习
就是不会给出标签的学习。
K-Means
-
聚类:基于距离度量,将对象集合聚类到簇(cluster)中,使得簇内对象的距离尽量小,且簇之间对象的距离尽量大。
-
向量x和y之间距离公式:
-
街区距离:
n是向量的维度。
-
欧式距离:
n是向量的维度。
-
-
K-Means算法流程:
- 初始化:
- 确定聚类的数目K。
- 随机选择K个数据点当作质心。
- 分配每个点到最近的质心:
- 对于每个数据点,计算它到每个质心的距离。
- 将每个数据点分配到距离最近的质心所属的簇。
- 更新质心:
- 对于每个簇,计算所有属于该簇的数据点的平均值,这个平均值就是新的质心。
- 更新质心的位置为新的平均值。
- 重复步骤2和步骤3:
- 反复执行步骤2和步骤3,直到质心不再发生变化,或者达到预设的迭代次数。
- 完成聚类:
- 最终的质心和数据点的分配结果即为K-means算法的输出。
- 初始化:
-
K-Means算法改进:
可以发现,一开始选择的质心很重要,很影响算法。所以初始化的质心应该离得越远越好。
-
K-Means++算法:
-
计算每个数据点x到最近的一个已选质心的距离
对于每个数据点 x,计算它到最近的一个已选质心的距离D(x)。假设我们已经选择了m 个质心 c1,c2,…,cm。
-
计算每个点被选中当质心的概率
将每个数据点 x 到最近质心的距离 D(x) 的平方作为该点被选为下一个质心的概率权重。具体来说,计算概率权重:
-
轮盘赌选择下一个质心
离被选中的质心越远被选做质心的可能性越大。
-
-
强化学习
强化学习基本要素有:状态、动作、策略、奖励、值函数(状态值函数、动作值函数)
强化学习的基本目标是:找到最大化奖励的策略。
-
状态值函数V(s):用于评断当前状态s在给定策略π下,未来累计的期望值。
两条公式是等价的。
-
动作值函数Q(s,a):表示在状态 s 下采取动作 a,然后遵循策略 π 时,未来累积奖励的期望值。
Q-learning
是一种贪心算法,学习的策略和实际的策略可能不同。异策略。
通过反复的试验和更新,逐渐逼近最优的状态值函数(Q函数),从而找到最优策略。
更新Q值的公式如下:
其中r是到达s’的奖励。
更新Q值时,因为是贪心算法,所以取s’状态的max值。
SARSA
学习的策略与实际执行的策略是一致的。同策略。
更新Q值的公式如下:
更新Q值时,所以取s’状态的Q值。
Q-learning 和 SARSA区别
- 策略类型
- Q-learning: Off-policy,学习的策略(最优策略)与执行的策略(探索策略)不同。
- SARSA: On-policy,学习的策略与执行的策略相同。
- 更新Q值的依据
- Q-learning: 更新Q值时使用的是新状态s’下的最大Q值(maxQ(s′,a′))。
- SARSA: 更新Q值时使用的是新状态s’下实际选择的动作的Q值(Q(s′,a′))。
TD时序差分
更改Q值的时候,还会利用到原本的Q值。
-
可以与Q-learning和SARSA混合使用。
-
Q-learning TD算法公式:
-
SARSA TD算法公式:
α是学习率,γ是折扣因子。
DQN
是Q-learning算法和深度神经网络结合,并额外引入两个机制经验回放和目标网络。
-
经验回放:将智能体探索环境得到的数据储存起来,然后随机采样小批次样本更新深度神经网络的参数。
-
目标网络:额外引入一个目标网络(和Q网络具有同样的网络结构),此目标网络不更新梯度,每隔一段时间将Q网络的参数赋值给此目标网络。
-
实现步骤:
- 初始化神经网络:包括主网络和目标网络的初始化。
- 与环境交互:使用当前策略(通常是 ε-greedy 策略)与环境交互,收集经验数据。
- 存储经验:将每次交互的经验(状态、动作、奖励、下一个状态)存储到经验回放缓冲区中。
- 经验回放:从经验回放缓冲区中随机抽取小批量的经验样本,用于训练主网络。
- Q-learning 更新:使用抽样的经验样本,计算 Q-learning 的目标并更新主网络的参数。
- 更新目标网络:定期更新目标网络的参数,以保持其与主网络的一致性,但更新频率较低,如每隔一定步数更新一次。
- 迭代训练:重复上述步骤直至收敛或达到预定的训练步数。
-
DQN和深度神经网络区别
-
概括
- 深度神经网络是一种通用的机器学习模型,用于学习输入数据中的复杂模式和特征。
- DQN 是一种强化学习算法,结合了深度神经网络和Q-learning的思想。
-
训练方法
- 深度神经网络训练通常使用监督学习或无监督学习的方法,通过最小化预测输出与真实标签之间的损失来优化网络参数。
- DQN训练过程是通过交互式学习与环境进行,智能体通过试错和反馈来优化动作值函数。
-
押题
谓词归结一题 贝叶斯网络一题 A*一题 Minimax剪枝一题 感觉爬山法可能会有一题
遗传一题
Qlearning一题
k-means一题
BP一题